JP2013013201A - Electric vehicle - Google Patents
Electric vehicle Download PDFInfo
- Publication number
- JP2013013201A JP2013013201A JP2011143335A JP2011143335A JP2013013201A JP 2013013201 A JP2013013201 A JP 2013013201A JP 2011143335 A JP2011143335 A JP 2011143335A JP 2011143335 A JP2011143335 A JP 2011143335A JP 2013013201 A JP2013013201 A JP 2013013201A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- drive
- battery
- power line
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Abstract
Description
本発明は、電動車両に関し、詳しくは、駆動輪に動力を入出力するモータと、バッテリと、リアクトルとスイッチング素子とを有しバッテリが接続された電池電圧系の電力を昇圧してモータが接続された駆動電圧系に供給可能な昇圧コンバータと、駆動電圧系の電圧が車両の運転条件に応じた目標電圧となるよう昇圧コンバータを制御する昇圧制御手段と、を備える電動車両に関する。 The present invention relates to an electric vehicle, and more particularly, a motor connected to a motor by boosting power of a battery voltage system having a motor that inputs / outputs power to / from drive wheels, a battery, a reactor, and a switching element and to which the battery is connected. The present invention relates to an electric vehicle including a boost converter that can be supplied to the drive voltage system and a boost control unit that controls the boost converter so that the voltage of the drive voltage system becomes a target voltage according to the driving conditions of the vehicle.
従来、この種の技術としては、蓄電池と、蓄電池の電圧を昇圧する昇圧回路と、昇圧された直流電圧を交流電圧に変換するインバータと、昇圧された直流電圧の変動を抑制するように昇圧回路を閉ループ制御する電圧制御部と、を備え、電圧制御部の応答時定数を交流電圧の周期の1倍以上としたものが提案されている(例えば、特許文献1参照)。この技術では、閉ループ制御の応答時定数を長くとることによって、交流電圧の周波数変動に対する過度な反応を鈍化させ、蓄電池のリプル電流を低減している。 Conventionally, this type of technology includes a storage battery, a booster circuit that boosts the voltage of the storage battery, an inverter that converts the boosted DC voltage into an AC voltage, and a booster circuit that suppresses fluctuations in the boosted DC voltage. And a voltage control unit that performs closed loop control, and a response time constant of the voltage control unit is set to be equal to or greater than one cycle of the AC voltage (see, for example, Patent Document 1). In this technique, by taking a long response time constant of the closed loop control, an excessive response to the frequency fluctuation of the AC voltage is slowed down, and the ripple current of the storage battery is reduced.
バッテリからの電力を昇圧してモータに供給可能な昇圧コンバータを備える電動車両では、昇圧コンバータの素子の保護を図ることが重要な課題の一つとして考えられている。特に、駆動輪のスリップ時には、モータの回転数の上昇によってモータの消費電力が大きくなりやすく、昇圧コンバータのリアクトルに流れる電流が大きくなりやすいことから、そのピーク値を抑制するために、電流のリプル成分を小さくすることが望まれる。 In an electric vehicle including a boost converter capable of boosting electric power from a battery and supplying it to a motor, it is considered as one of important issues to protect the elements of the boost converter. In particular, when the drive wheel slips, the power consumption of the motor tends to increase due to an increase in the rotation speed of the motor, and the current flowing through the reactor of the boost converter tends to increase. It is desirable to reduce the components.
本発明の電動車両は、昇圧コンバータの素子を保護することを主目的とする。 The main object of the electric vehicle of the present invention is to protect the elements of the boost converter.
本発明の電動車両は、上述の主目的を達成するために以下の手段を採った。 The electric vehicle of the present invention employs the following means in order to achieve the main object described above.
本発明の電動車両は、
駆動輪に動力を入出力するモータと、バッテリと、リアクトルとスイッチング素子とを有し前記バッテリが接続された電池電圧系の電力を昇圧して前記モータが接続された駆動電圧系に供給可能な昇圧コンバータと、前記駆動電圧系の電圧が車両の運転条件に応じた目標電圧となるよう前記昇圧コンバータを制御する昇圧制御手段と、を備える電動車両において、
前記昇圧制御手段は、前記駆動輪のスリップ時には、前記駆動電圧系の電圧が前記電池電圧系の電圧の2倍を含む所定範囲外となるよう前記昇圧コンバータを制御する手段である、
ことを要旨とする。
The electric vehicle of the present invention is
A motor that inputs / outputs power to / from the drive wheels, a battery, a reactor, and a switching element, boosts the power of a battery voltage system to which the battery is connected, and can be supplied to the drive voltage system to which the motor is connected In an electric vehicle comprising: a boost converter; and a boost control means for controlling the boost converter so that the voltage of the drive voltage system becomes a target voltage corresponding to a driving condition of the vehicle.
The step-up control means is means for controlling the step-up converter so that when the drive wheel slips, the voltage of the drive voltage system is outside a predetermined range including twice the voltage of the battery voltage system.
This is the gist.
この本発明の電動車両では、駆動輪のスリップ時には、駆動電圧系の電圧が電池電圧系の電圧の2倍を含む所定範囲外となるよう昇圧コンバータを制御する。リアクトルに流れる電流のリプル成分の大きさΔILは、電池電圧系の電圧をVL,駆動電圧系の電圧をVH,リアクトルのインダクタンスをL,スイッチング素子のスイッチング周波数(キャリア周波数)をfcとすると、次式(1)により計算され、駆動電圧系の電圧VHが電池電圧系の電圧VLの2倍のとき(電池電圧系の電圧VLと駆動電圧系の電圧VHとの比が1:2のとき)に最大となる。前述したように、駆動輪のスリップ時には、リアクトルに流れる電流が大きくなりやすいから、駆動電圧系の電圧が電池電圧系の電圧の2倍を含む所定範囲外となるよう昇圧コンバータを制御することにより、リアクトルに流れる電流のリプル成分が最大とならない範囲で駆動電圧系の電圧を調節することができ、リアクトルに流れる電流のピーク値が過剰になるのを抑制することができる。この結果、昇圧コンバータの素子をより保護することができる。もとより、駆動輪のスリップ時でないときには、駆動電圧系の電圧が電池電圧系の電圧の2倍を含む所定範囲外となるよう昇圧コンバータを制御することを行なわないから、何ら制限されることなく電池電圧系の電力を昇圧して駆動電圧系に供給することができる。 In the electric vehicle of the present invention, when the drive wheel slips, the boost converter is controlled so that the voltage of the drive voltage system is outside a predetermined range including twice the voltage of the battery voltage system. The magnitude ΔIL of the ripple component of the current flowing through the reactor is as follows, assuming that the voltage of the battery voltage system is VL, the voltage of the drive voltage system is VH, the inductance of the reactor is L, and the switching frequency (carrier frequency) of the switching element is fc. When the driving voltage system voltage VH is twice the battery voltage system voltage VL (when the ratio of the battery voltage system voltage VL to the driving voltage system voltage VH is 1: 2). To the maximum. As described above, when the drive wheel slips, the current flowing through the reactor tends to increase. Therefore, by controlling the boost converter so that the voltage of the drive voltage system is outside the predetermined range including twice the voltage of the battery voltage system. The voltage of the drive voltage system can be adjusted in a range where the ripple component of the current flowing through the reactor is not maximized, and the peak value of the current flowing through the reactor can be suppressed from becoming excessive. As a result, the boost converter element can be further protected. Of course, when the driving wheel is not slipping, the boost converter is not controlled so that the voltage of the driving voltage system is out of a predetermined range including twice the voltage of the battery voltage system. The voltage system power can be boosted and supplied to the drive voltage system.
![]()
![]()
こうした本発明の電動車両において、前記昇圧制御手段は、前記駆動輪のスリップ時に前記駆動電圧系の電圧が前記所定範囲内となるときには、前記駆動電圧系の電圧が前記目標電圧より高く且つ前記所定範囲外となるよう前記昇圧コンバータを制御する手段である、ものとすることもできる。こうすれば、電動機の駆動制御を余裕をもって行なうことができる。 In such an electric vehicle according to the present invention, the boost control means is configured such that when the drive voltage system voltage falls within the predetermined range when the drive wheel slips, the drive voltage system voltage is higher than the target voltage and the predetermined voltage. It may be a means for controlling the boost converter to be out of range. If it carries out like this, drive control of an electric motor can be performed with a margin.
次に、本発明を実施するための形態を実施例を用いて説明する。 Next, the form for implementing this invention is demonstrated using an Example.
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、エンジン22を駆動制御するエンジン用電子制御ユニット(以下、エンジンECUという)24と、エンジン22のクランクシャフト26にキャリアが接続されると共に駆動輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36にリングギヤが接続されたプラネタリギヤ30と、例えば同期発電電動機として構成されて回転子がプラネタリギヤ30のサンギヤに接続されたモータMG1と、例えば同期発電電動機として構成されて回転子が駆動軸36に接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42をスイッチング制御することによってモータMG1,MG2を駆動制御するモータ用電子制御ユニット(以下、モータECUという)40と、例えばリチウムイオン二次電池として構成されたバッテリ50と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、バッテリECUという)52と、インバータ41,42が接続された電力ライン(以下、駆動電圧系電力ラインという)54aとバッテリ50が接続された電力ライン(以下、電池電圧系電力ラインという)54bとに接続されて駆動電圧系電力ライン54aの電圧VHを電池電圧系電力ライン54bの電圧VLから最大許容電圧VHmaxの範囲内で調節すると共に駆動電圧系電力ライン54aと電池電圧系電力ライン54bとの間で電力のやりとりを行なう昇圧コンバータ55と、車両全体を制御するハイブリッド用電子制御ユニット70と、を備える。ここで、最大許容電圧VHmaxは、後述のコンデンサ57の耐圧よりも若干低い値などを用いることができる。
FIG. 1 is a configuration diagram showing an outline of the configuration of a
モータMG1およびモータMG2は、いずれも永久磁石が埋め込まれたロータと三相コイルが巻回されたステータとを備える周知の同期発電電動機として構成されている。インバータ41,42は、図2のモータMG1,MG2を含む電機駆動系の構成図に示すように、6つのトランジスタT11〜T16,T21〜26と、トランジスタT11〜T16,T21〜T26に逆方向に並列接続された6つのダイオードD11〜D16,D21〜D26と、により構成されている。トランジスタT11〜T16,T21〜T26は、それぞれ駆動電圧系電力ライン54aの正極母線と負極母線とに対してソース側とシンク側になるよう2個ずつペアで配置されており、対となるトランジスタ同士の接続点の各々にモータMG1,MG2の三相コイル(U相,V相,W相)の各々が接続されている。したがって、駆動電圧系電力ライン54aの正極母線と負極母線との間に電圧が作用している状態で対をなすトランジスタT11〜T16,T21〜T26のオン時間の割合を制御することにより三相コイルに回転磁界を形成でき、モータMG1,MG2を回転駆動することができる。インバータ41,42は、駆動電圧系電力ライン54aの正極母線と負極母線とを共用しているから、モータMG1,MG2のいずれかで発電される電力を他のモータに供給することができる。駆動電圧系電力ライン54aの正極母線と負極母線とには平滑用のコンデンサ57が接続されている。
Each of the motor MG1 and the motor MG2 is configured as a known synchronous generator motor including a rotor in which a permanent magnet is embedded and a stator around which a three-phase coil is wound. As shown in the block diagram of the electric drive system including the motors MG1 and MG2 in FIG. 2, the
モータECU40は、図示しないCPUを中心とするマイクロプロセッサとして構成されており、CPUの他にROMやRAM,入出力ポート,通信ポートを備える。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からのモータMG1,MG2の回転子の回転位置や図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流,インバータ41,42に取り付けられた図示しない温度センサからのインバータ温度などが入力されており、モータECU40からは、インバータ41,42のトランジスタT11〜T16,T21〜26へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。なお、モータECU40は、回転位置検出センサ43,44からのモータMG1,MG2の回転子の回転位置に基づいてモータMG1,MG2の回転数Nm1,Nm2も演算している。
The motor ECU 40 is configured as a microprocessor centered on a CPU (not shown), and includes a ROM, a RAM, an input / output port, and a communication port in addition to the CPU. The motor ECU 40 receives signals necessary for driving and controlling the motors MG1 and MG2, for example, the rotational positions of the rotors of the motors MG1 and MG2 from the rotational
昇圧コンバータ55は、図2に示すように、2つのトランジスタT31,T32とトランジスタT31,T32に逆方向に並列接続された2つのダイオードD31,D32とリアクトルLとからなる昇圧コンバータとして構成されている。2つのトランジスタT31,T32は、それぞれ駆動電圧系電力ライン54aの正極母線と駆動電圧系電力ライン54aおよび電池電圧系電力ライン54bの負極母線とに接続されており、その接続点にリアクトルLが接続されている。また、リアクトルLと駆動電圧系電力ライン54aおよび電池電圧系電力ライン54bの負極母線とにはそれぞれバッテリ50の正極端子と負極端子とが接続されている。したがって、トランジスタT31,T32をオンオフ制御することにより、電池電圧系電力ライン54bの電力を昇圧して駆動電圧系電力ライン54aに供給したり、駆動電圧系電力ライン54aの電力を降圧して電池電圧系電力ライン54bに供給したりすることができる。リアクトルLと駆動電圧系電力ライン54aおよび電池電圧系電力ライン54bの負極母線とには平滑用のコンデンサ58が接続されている。
As shown in FIG. 2, the
バッテリECU52は、図示しないCPUを中心とするマイクロプロセッサとして構成されており、CPUの他にROMやRAM,入出力ポート,通信ポートを備える。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧,バッテリ50の出力端子に接続された電池電圧系電力ライン54bに取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた図示しない温度センサからの電池温度などが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。また、バッテリECU52は、バッテリ50を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)を演算したり、演算した残容量(SOC)と電池温度Tbとに基づいてバッテリ50を充放電してもよい最大許容電力である入出力制限Win,Woutを演算している。なお、バッテリ50の入出力制限Win,Woutは、電池温度Tbに基づいて入出力制限Win,Woutの基本値を設定し、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定することができる。
The
ハイブリッド用電子制御ユニット70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74と、データを一時的に記憶するRAM76と、図示しない入出力ポートおよび通信ポートとを備える。ハイブリッド用電子制御ユニット70には、コンデンサ57の端子間に取り付けられた電圧センサ57aからのコンデンサ57の電圧(駆動電圧系電力ライン54aの電圧)VHやコンデンサ58の端子間に取り付けられた電圧センサ58aからのコンデンサ58の電圧(電池電圧系電力ライン54bの電圧)VL,イグニッションスイッチ80からのイグニッション信号,シフトレバーの操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダルの踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダルの踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速Vなどが入力ポートを介して入力されている。ハイブリッド用電子制御ユニット70からは、昇圧コンバータ55のトランジスタT31,T32へのスイッチング制御信号などが出力ポートを介して出力されている。ハイブリッド用電子制御ユニット70は、前述したように、エンジンECU24やモータECU40,バッテリECU52と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52と各種制御信号やデータのやりとりを行なっている。
The hybrid
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダルの踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力が駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2からの要求動力に見合う動力を駆動軸36に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードと充放電運転モードは、いずれもエンジン22の運転を伴って要求動力が駆動軸36に出力されるようエンジン22とモータMG1,MG2とを制御するモードであるから、両者を合わせてエンジン運転モードとして考えることができる。
The
エンジン運転モードでは、ハイブリッド用電子制御ユニット70は、アクセルペダルポジションセンサ84からのアクセル開度Accと車速センサ88からの車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を設定し、設定した要求トルクTr*に駆動軸36の回転数Nr(例えば、モータMG2の回転数Nm2や車速Vに換算係数を乗じて得られる回転数)を乗じて走行に要求される走行用パワーPdrv*を計算すると共に計算した走行用パワーPdrv*からバッテリ50の残容量(SOC)に基づいて得られるバッテリ50の充放電要求パワーPb*(バッテリ50から放電するときが正の値)を減じてエンジン22から出力すべきパワーとしての要求パワーPe*を設定し、要求パワーPe*を効率よくエンジン22から出力することができるエンジン22の回転数NeとトルクTeとの関係としての動作ライン(例えば燃費最適動作ライン)を用いてエンジン22の目標回転数Ne*と目標トルクTe*とを設定し、バッテリ50の入出力制限Win,Woutの範囲内で、エンジン22を目標回転数Ne*で回転させるための回転数フィードバック制御によりモータMG1から出力すべきトルクとしてのトルク指令Tm1*を設定すると共にモータMG1をトルク指令Tm1*で駆動したときにプラネタリギヤ30を介して駆動軸36に作用するトルクを要求トルクTr*から減じてモータMG2のトルク指令Tm2*を設定し、目標回転数Ne*と目標トルクTe*とについてはエンジンECU24に送信し、トルク指令Tm1*,Tm2*についてはモータECU40に送信する。そして、目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、目標回転数Ne*と目標トルクTe*とによってエンジン22が運転されるようエンジン22における吸入空気量制御や燃料噴射制御,点火制御などを行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のトランジスタT11〜T16,T21〜T26のスイッチング制御を行なう。このエンジン運転モードでは、エンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を運転停止した方がよいとして定められた閾値Pstop未満に至ったときなどに、エンジン22の運転を停止してモータ運転モードに移行する。
In the engine operation mode, the hybrid
モータ運転モードでは、ハイブリッド用電子制御ユニット70は、アクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクTr*を設定し、モータMG1のトルク指令Tm1*に値0を設定すると共にバッテリ50の入出力制限Win,Woutの範囲内で要求トルクTr*が駆動軸36に出力されるようモータMG2のトルク指令Tm2*を設定してこれらをモータECU40に送信する。そして、トルク指令Tm1*,Tm2*を受信したモータECU40は、モータMG1,MG2がトルク指令Tm1*,Tm2*で駆動されるようインバータ41,42のトランジスタT11〜T16,T21〜26のスイッチング制御を行なう。このモータ運転モードでは、要求トルクTr*に駆動軸36の回転数Nrを乗じて得られる走行用パワーPdrv*からバッテリ50の充放電要求パワーPb*を減じて得られるエンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を始動した方がよいとして定められた閾値Pstart以上に至ったときなどに、エンジン22を始動してエンジン運転モードに移行する。
In the motor operation mode, the hybrid
次に、こうして構成された実施例のハイブリッド自動車20の動作、特に、駆動電圧系電力ライン54aの電圧VHを調節する制御について説明する。図3は、ハイブリッド用電子制御ユニット70により実行される昇圧制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば、数msec毎)に繰り返し実行される。
Next, the operation of the
昇圧制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2のトルク指令Tm1*,Tm2*や回転数Nm1,Nm2,電圧センサ58aからのコンデンサ58の電圧(電池電圧系電力ライン54bの電圧)VL,電圧センサ57aからのコンデンサ57の電圧(駆動電圧系電力ライン54aの電圧)VH,スリップ判定フラグFなど制御に必要なデータを入力する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、回転位置検出センサ43,44により検出されたモータMG1,MG2の回転子の回転位置に基づいて演算されたものをモータECU40から通信により入力するものとした。また、モータMG1,MG2のトルク指令Tm1*,Tm2*は、上述の駆動制御の処理で設定されたものを入力するものとした。スリップ判定フラグFは、初期値として値0が設定され、駆動輪38a,38bの空転によるスリップが生じたときに値1が設定され、その状態からスリップが収束したときに値0が設定されるフラグである。なお、駆動輪38a,38bのスリップが生じたか否かは、駆動輪38a,38bに車輪速センサを取り付けてその車輪速センサによって検出される車輪速の変化率を用いたり、モータMG2の回転数Nm2の変化率を用いたりすることにより判定することができる。
When the boost control routine is executed, first, the
こうしてデータを入力すると、モータMG1,MG2のトルク指令Tm1*,Tm2*と回転数Nm1,Nm2とに基づいて駆動電圧系電力ライン54aの目標電圧VH*を設定する(ステップS110)。ここで、駆動電圧系電力ライン54aの目標電圧VH*は、実施例では、モータMG1の目標動作点(トルク指令Tm1*,回転数Nm1)でモータMG1を駆動できる電圧とモータMG2の目標動作点(トルク指令Tm2*,回転数Nm2)でモータMG2を駆動できる電圧とのうち大きい方の電圧を設定するものとした。
When the data is thus input, the target voltage VH * of the drive voltage
次に、スリップ判定フラグFの値を調べる(ステップS120)。スリップ判定フラグFが値0のときには、駆動輪38a,38bのスリップは発生していないと判断し、駆動電圧系電力ライン54aの電圧VHが設定した目標電圧VH*となるよう昇圧コンバータ55のトランジスタT31,T32のスイッチング制御を行なって(ステップS150)、本ルーチンを終了する。この場合、目標電圧VH*には、モータMG1,MG2を駆動するのに必要な値が設定されているから、駆動電圧系電力ライン54aの電圧VHを目標電圧VH*とすることにより、運転者の要求する走行を行なうことができる。
Next, the value of the slip determination flag F is checked (step S120). When the slip determination flag F is 0, it is determined that no slip has occurred in the
一方、ステップS120でスリップ判定フラグFが値1のときには、駆動輪38a,38bのスリップが発生していると判断し、駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内であるか否かを判定し(ステップS130)、駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外であると判定されたときには、駆動電圧系電力ライン54aの電圧VHが設定した目標電圧VH*となるよう昇圧コンバータ55のトランジスタT31,T32のスイッチング制御を行なって(ステップS150)、本ルーチンを終了する。駆動電圧系電力ライン54aの電圧VHを目標電圧VH*としたときの昇圧コンバータ55のリアクトルLに流れる電流ILのリプル成分の大きさΔIL(以下、リプル成分ΔILと略す)は、昇圧コンバータ55のリアクトルLのインダクタンスをL,昇圧コンバータ55のトランジスタT31,T32のスイッチング周波数(キャリア周波数)をfcとすると、次式(2)により計算することができる。この式(2)から、電池電圧系電力ライン54bのリアクトルLとリプル成分ΔILとの関係を示すと、図4のようになることが分かる。即ち、電池電圧系電力ライン54bの電圧VLと駆動電圧系電力ライン54aの電圧VHとの比が1:2のときにリプル成分ΔILが最大となることが分かる。駆動輪38a,38bのスリップ時には、モータMG2の回転数Nm2の上昇によってモータMG2の消費電力が増加しリアクトルLに流れる電流ILが大きくなりやすいことから、昇圧コンバータ55の素子などの保護の観点から、リアクトルLの電流ILのリプル成分ΔILをより抑制することが好ましい。ステップS130の駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内であるか否かの判定は、駆動輪38a,38bのスリップ時にリアクトルLの電流ILのリプル成分ΔILが大きくなる範囲内であるか否かを判定する処理である。したがって、駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外であるときには、リアクトルLの電流ILのリプル成分ΔILが大きい範囲ではないと判断し、ステップS110で設定した駆動電圧系電力ライン54aの目標電圧VH*を用いて昇圧コンバータ55のトランジスタT31,T32のスイッチング制御を行なうのである。なお、「α」は、例えば値0.05や値0.1,値0.15などを用いることができる。
On the other hand, when the slip determination flag F is a value of 1 in step S120, it is determined that slip of the
![]()
![]()
ステップS130で駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内であると判定されたときには、リアクトルLの電流ILのリプル成分ΔILが大きい範囲であると判断し、駆動電圧系電力ライン54aの目標電圧VH*を再設定し(ステップS140)、駆動電圧系電力ライン54aの電圧VHが再設定した目標電圧VH*となるよう昇圧コンバータ55のトランジスタT31,T32のスイッチング制御を行なって(ステップS150)、本ルーチンを終了する。ここで、駆動電圧系電力ライン54aの目標電圧VH*の再設定は、実施例では、モータMG1,MG2の駆動に応じた値(ステップS110で設定した値)より大きく、且つ、電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外となるよう設定するものとした。具体的には、電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を上回る最小値を次式(3)により駆動電圧系電力ライン54aの目標電圧VH*として設定するものとした。このように、駆動輪38a,38bのスリップ時に駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内となるときには、駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外となるよう昇圧コンバータ55を制御することにより、リアクトルLに流れる電流ILが過剰に大きくなるのを抑制することができる。この結果、昇圧コンバータの素子をより保護することができる。また、再設定する目標電圧VH*はモータMG1,MG2の駆動に応じた値(ステップS110で設定した目標電圧VH*)より大きく設定されるから、モータMG1,MG2の駆動制御については何ら支障を生じさせることがない。
When it is determined in step S130 that the target voltage VH * of the drive voltage
VH*=2・VL+α ・・・(3) VH * = 2 ・ VL + α (3)
以上説明した実施例のハイブリッド自動車20によれば、駆動輪38a,38bのスリップ時において、モータMG1,MG2の駆動に応じて設定した駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外となるときには駆動電圧系電力ライン54aの電圧VHが設定した目標電圧VH*となるよう昇圧コンバータ55を制御し、モータMG1,MG2の駆動に応じて設定した駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内となるときには電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を上回る値を目標電圧VH*として再設定して駆動電圧系電力ライン54aの電圧VHが再設定した目標電圧VH*となるよう昇圧コンバータ55を制御するから、即ち、駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲外となるようにするから、昇圧コンバータ55のリアクトルLに流れる電流ILが過剰に大きくなるのを抑制することができ、昇圧コンバータ55の素子をより保護することができる。しかも、再設定する目標電圧VH*は、モータMG1,MG2の駆動に応じた値より大きな値とするから、モータMG1,MG2の駆動制御については何ら支障を生じさせない。
According to the
実施例のハイブリッド自動車20では、駆動輪38a,38bのスリップ時に駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内となるときには、電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を上回る値を目標電圧VH*として再設定するものとしたが、電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を下回る値を目標電圧VH*として再設定するものとしてもよい。また、駆動輪38a,38bのスリップ時に駆動電圧系電力ライン54aの目標電圧VH*が電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲内となるときに、目標電圧VH*が電圧VLの2倍以上のときには電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を上回る値を目標電圧VH*として再設定し、目標電圧VH*が電圧VLの2倍未満のときには電池電圧系電力ライン54bの電圧VLの2倍プラスマイナスαの範囲を下回る値を目標電圧VH*として再設定するものとしてもよい。
In the
実施例のハイブリッド自動車20では、モータMG2からの動力を駆動輪38a,38bに連結された駆動軸36に出力するものとしたが、図5の変形例のハイブリッド自動車120に例示するように、モータMG2からの動力を駆動軸36が接続された車軸(駆動輪38a,38bに接続された車軸)とは異なる車軸(図5における車輪39a,39bに接続された車軸)に出力するものとしてもよい。
In the
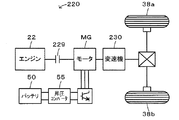
実施例のハイブリッド自動車20では、エンジン22からの動力をプラネタリギヤ30を介して駆動輪38a,38bに接続された駆動軸36に出力すると共にモータMG2からの動力を駆動軸36に出力するものとしたが、図6の変形例のハイブリッド自動車220に例示するように、駆動輪38a,38bに接続された駆動軸に変速機230を介してモータMGを取り付け、モータMGの回転軸にクラッチ229を介してエンジン22を接続する構成とし、エンジン22からの動力をモータMGの回転軸と変速機230とを介して駆動軸に出力すると共にモータMGからの動力を変速機230を介して駆動軸に出力するものとしてもよい。また、図7の変形例のハイブリッド自動車320に例示するように、エンジン22からの動力を変速機330を介して駆動輪38a,38bに接続された車軸に出力すると共にモータMGからの動力を駆動輪38a,38bに接続された車軸とは異なる車軸(図7における車輪39a,39bに接続された車軸)に出力するものとしてもよい。
In the
実施例では、本発明を、駆動軸36にプラネタリギヤ30を介して接続されたエンジン22およびモータMG1と、駆動軸36に接続されたモータMG2と、を備えるハイブリッド自動車20に適用するものとしたが、図8の変形例の電気自動車420に例示するように、走行用の動力を出力するモータMGを備える単純な電気自動車に適用するものとしてもよい。
In the embodiment, the present invention is applied to the
また、こうした自動車に限定されるものではなく、列車などの電動車両の形態としてもよいし、電動車両の電圧制御方法の形態としてもよい。 Moreover, it is not limited to such a motor vehicle, It is good also as a form of electric vehicles, such as a train, and good also as a form of the voltage control method of an electric vehicle.
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、モータMG2が「モータ」に相当し、バッテリ50が「バッテリ」に相当し、昇圧コンバータ55が「昇圧コンバータ」に相当し、ハイブリッド用電子制御ユニット70が「昇圧制御手段」に相当する。
The correspondence between the main elements of the embodiment and the main elements of the invention described in the column of means for solving the problems will be described. In the embodiment, the motor MG2 corresponds to the “motor”, the
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。 The correspondence between the main elements of the embodiment and the main elements of the invention described in the column of means for solving the problem is the same as that of the embodiment described in the column of means for solving the problem. Therefore, the elements of the invention described in the column of means for solving the problems are not limited. That is, the interpretation of the invention described in the column of means for solving the problems should be made based on the description of the column, and the examples are those of the invention described in the column of means for solving the problems. It is only a specific example.
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。 As mentioned above, although the form for implementing this invention was demonstrated using the Example, this invention is not limited at all to such an Example, In the range which does not deviate from the summary of this invention, it is with various forms. Of course, it can be implemented.
本発明は、電動車両の製造産業などに利用可能である。 The present invention can be used in the manufacturing industry of electric vehicles.
20,120,220,320 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 駆動輪、39a,39b 車輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54a 駆動電圧系電力ライン、54b 電池電圧系電力ライン、55 昇圧コンバータ、57,58 コンデンサ、57a,58a 電圧センサ、70 ハイブリッド用電子制御ユニット、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、82 シフトポジションセンサ、84 アクセルペダルポジションセンサ、86 ブレーキペダルポジションセンサ、88 車速センサ、229 クラッチ、230,330 変速機、420 電気自動車、D11〜D16,D21〜D26,D31,D32 ダイオード、L リアクトル、MG1,MG2 モータ、T11〜T16,T21〜T26,T31,T32 トランジスタ。 20, 120, 220, 320 Hybrid vehicle, 22 engine, 24 engine electronic control unit (engine ECU), 26 crankshaft, 30 planetary gear, 36 drive shaft, 37 differential gear, 38a, 38b drive wheel, 39a, 39b wheel, 40 motor electronic control unit (motor ECU), 41, 42 inverter, 43, 44 rotational position detection sensor, 50 battery, 52 battery electronic control unit (battery ECU), 54a drive voltage system power line, 54b battery voltage system power Line, 55 Boost converter, 57, 58 Capacitor, 57a, 58a Voltage sensor, 70 Hybrid electronic control unit, 72 CPU, 74 ROM, 76 RAM, 80 Ignition switch, 82 Shift switch Sensor, 84 accelerator pedal position sensor, 86 brake pedal position sensor, 88 vehicle speed sensor, 229 clutch, 230, 330 transmission, 420 electric vehicle, D11-D16, D21-D26, D31, D32 diode, L reactor, MG1, MG2 motor, T11 to T16, T21 to T26, T31, T32 transistors.
Claims (1)
前記昇圧制御手段は、前記駆動輪のスリップ時には、前記駆動電圧系の電圧が前記電池電圧系の電圧の2倍を含む所定範囲外となるよう前記昇圧コンバータを制御する手段である、
電動車両。 A motor that inputs / outputs power to / from the drive wheels, a battery, a reactor, and a switching element, boosts the power of a battery voltage system to which the battery is connected, and can be supplied to the drive voltage system to which the motor is connected In an electric vehicle comprising: a boost converter; and a boost control means for controlling the boost converter so that the voltage of the drive voltage system becomes a target voltage corresponding to a driving condition of the vehicle.
The step-up control means is means for controlling the step-up converter so that when the drive wheel slips, the voltage of the drive voltage system is outside a predetermined range including twice the voltage of the battery voltage system.
Electric vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011143335A JP2013013201A (en) | 2011-06-28 | 2011-06-28 | Electric vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011143335A JP2013013201A (en) | 2011-06-28 | 2011-06-28 | Electric vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013013201A true JP2013013201A (en) | 2013-01-17 |
Family
ID=47686579
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011143335A Withdrawn JP2013013201A (en) | 2011-06-28 | 2011-06-28 | Electric vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013013201A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015196455A (en) * | 2014-04-01 | 2015-11-09 | トヨタ自動車株式会社 | Hybrid electric vehicle control system |
-
2011
- 2011-06-28 JP JP2011143335A patent/JP2013013201A/en not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015196455A (en) * | 2014-04-01 | 2015-11-09 | トヨタ自動車株式会社 | Hybrid electric vehicle control system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4424428B2 (en) | Electric motor drive control device, vehicle including the same, and electric motor drive control method | |
| JP5772782B2 (en) | vehicle | |
| CN108068799B (en) | Hybrid vehicle | |
| JP4123269B2 (en) | POWER OUTPUT DEVICE, VEHICLE MOUNTING THE SAME, AND METHOD FOR CONTROLLING POWER OUTPUT DEVICE | |
| US9932032B2 (en) | Hybrid vehicle | |
| JP2021084537A (en) | Hybrid vehicle | |
| JP6575544B2 (en) | Hybrid car | |
| JP5221444B2 (en) | Buck-boost converter control device, hybrid vehicle equipped with the same, and buck-boost converter control method | |
| JP5370291B2 (en) | vehicle | |
| JP5341572B2 (en) | Control method for buck-boost converter | |
| JP5211743B2 (en) | POWER SUPPLY DEVICE, VEHICLE MOUNTING THE SAME, AND CONTROL METHOD FOR POWER SUPPLY DEVICE | |
| JP2012135124A (en) | Vehicle | |
| JP2018184133A (en) | Hybrid vehicle | |
| JP5412839B2 (en) | Power supply device, control method therefor, and vehicle | |
| JP2011162130A (en) | Hybrid vehicle and control method for the same | |
| JP6489100B2 (en) | Hybrid car | |
| JP2018144687A (en) | Hybrid vehicle | |
| CN108725426B (en) | Hybrid vehicle and control method thereof | |
| JP2012222907A (en) | Electric vehicle | |
| JP6607217B2 (en) | Hybrid car | |
| JP2013013201A (en) | Electric vehicle | |
| JP2016100965A (en) | Electric vehicle | |
| JP2013124084A (en) | Hybrid vehicle | |
| JP2012192769A (en) | Electric vehicle | |
| JP2011152834A (en) | Vehicle, and method for controlling the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140902 |